在汽车电子系统日益复杂化的今天,AUTOSAR(AUTomotive Open System ARchitecture,汽车开放系统架构)已成为行业标准,旨在实现软件的可复用性、可互换性和可扩展性。其中,MCAL(Microcontroller Abstraction Layer,微控制器抽象层)作为AUTOSAR分层架构的基石,扮演着连接硬件与上层软件的关键角色。本文将深入解析AUTOSAR MCAL软件架构的基本概念及其提供的基础软件服务。
一、AUTOSAR MCAL的核心概念
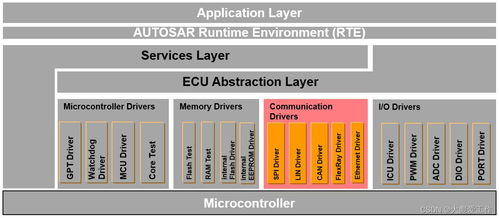
- 定义与定位:MCAL是AUTOSAR基础软件(BSW)的最底层,直接与微控制器(MCU)及其内部外设(如ADC、CAN、PWM、GPIO等)交互。其主要目标是实现硬件抽象,为上层的ECU抽象层(ECU Abstraction Layer)和复杂驱动(Complex Drivers)提供标准化的、与具体MCU型号无关的接口。这使得应用层软件和大部分基础软件可以在不同的硬件平台上移植和复用,极大地降低了开发成本和周期。
- 模块化设计:MCAL并非一个单一的整体,而是由一系列独立且高度模块化的驱动(Drivers)组成。每个驱动负责管理MCU的一个特定硬件模块或外设。例如:
- DIO驱动:用于控制数字输入/输出端口。
- ADC驱动:用于配置和读取模数转换器。
- PWM驱动:用于生成脉宽调制信号。
- CAN驱动:用于控制器局域网通信的底层配置与数据收发。
- SPI/I2C驱动:用于串行外设接口通信。
- MCU驱动:提供MCU的初始化、时钟、电源模式和看门狗等核心服务。
- 标准API接口:所有MCAL模块都遵循AUTOSAR标准定义的应用程序编程接口(API)。这些API是标准化的、静态配置的(通常在配置阶段通过工具如EB Tresos、DaVinci Configurator完成),确保了上层软件调用的一致性。
二、MCAL的关键功能与基础软件服务
MCAL向上层软件提供了一系列基础且关键的服务,这些服务是汽车ECU功能正常运行的前提:
- 硬件初始化和配置服务:在ECU上电或复位后,MCAL模块(尤其是MCU驱动)负责根据配置参数初始化MCU的核心系统(如时钟树、锁相环PLL、内存保护单元MPU)以及各个外设,使其进入预定义的工作状态。
- 数字/模拟I/O服务:通过DIO和ADC等驱动,提供读取开关量信号、驱动执行器以及采集模拟传感器信号(如温度、压力)的能力。这是ECU感知和控制物理世界的基础。
- 定时与调度服务:通过GPT(通用定时器)驱动提供精确的定时、延时和周期触发功能,为操作系统(OS)的调度和任务执行提供底层时间基准。
- 通信服务:为车载网络(如CAN、LIN、FlexRay、以太网)和芯片间通信(如SPI)提供底层驱动。CAN驱动负责处理CAN控制器的配置、报文收发、硬件过滤和中断处理,将复杂的硬件操作封装成简单的API。
- 存储访问服务:通过Fls(Flash驱动)和Fee(Flash EEPROM仿真)模块,提供对内部或外部Flash存储器的擦除、编程和读取服务,支持数据存储和程序更新。
- 安全与诊断服务:MCU驱动中的看门狗(WDT)管理、内存保护单元(MPU)配置等,为系统提供基本的运行监控和故障保护机制。
三、MCAL在AUTOSAR架构中的价值
- 硬件独立性:将应用软件与底层硬件解耦,使OEM和Tier1供应商能够灵活选择或更换MCU供应商,而无需重写上层软件。
- 提高软件质量:标准化的接口和经过充分验证的驱动模块,提升了整个软件系统的可靠性和稳定性。
- 提升开发效率:工程师可以专注于应用逻辑和集成,而无需深入钻研每种MCU的寄存器手册,工具链支持的自动配置也大幅减少了手动编码的工作量。
###
AUTOSAR MCAL是汽车电子软件架构的“地基”,其通过提供标准化、模块化的硬件抽象层,将复杂的微控制器操作封装成清晰、统一的接口。它所提供的基础软件服务,涵盖了从I/O控制、定时管理到通信、存储等各个方面,是上层复杂功能(如通信协议栈、诊断、状态管理)得以构建和稳定运行的保障。深入理解MCAL的基本概念和其提供的服务,是进行高效、可靠的AUTOSAR标准软件开发的必要条件。